Servo motore a due posizioni memorizzabili
SERVO CONTROL SYSTEM
Le funzioni principali sono descritte nella pagina seguente.
Elenco funzioni:
- Macchina a stati
- Accelerazione esponenziale
- Filtro IIR
- EEPROM integrata
- Comandi seriali avanzati
- Attach/Detach intelligente
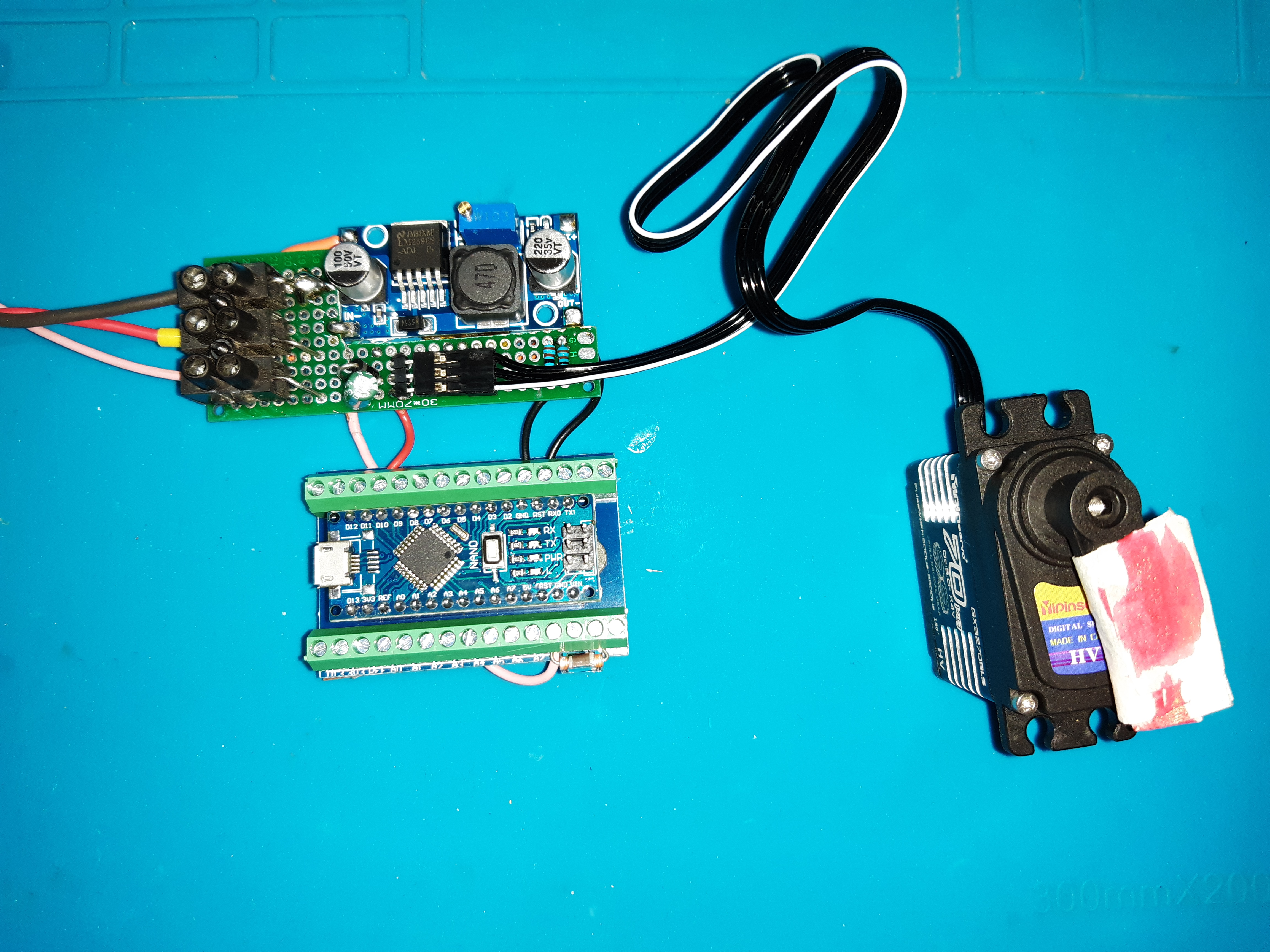
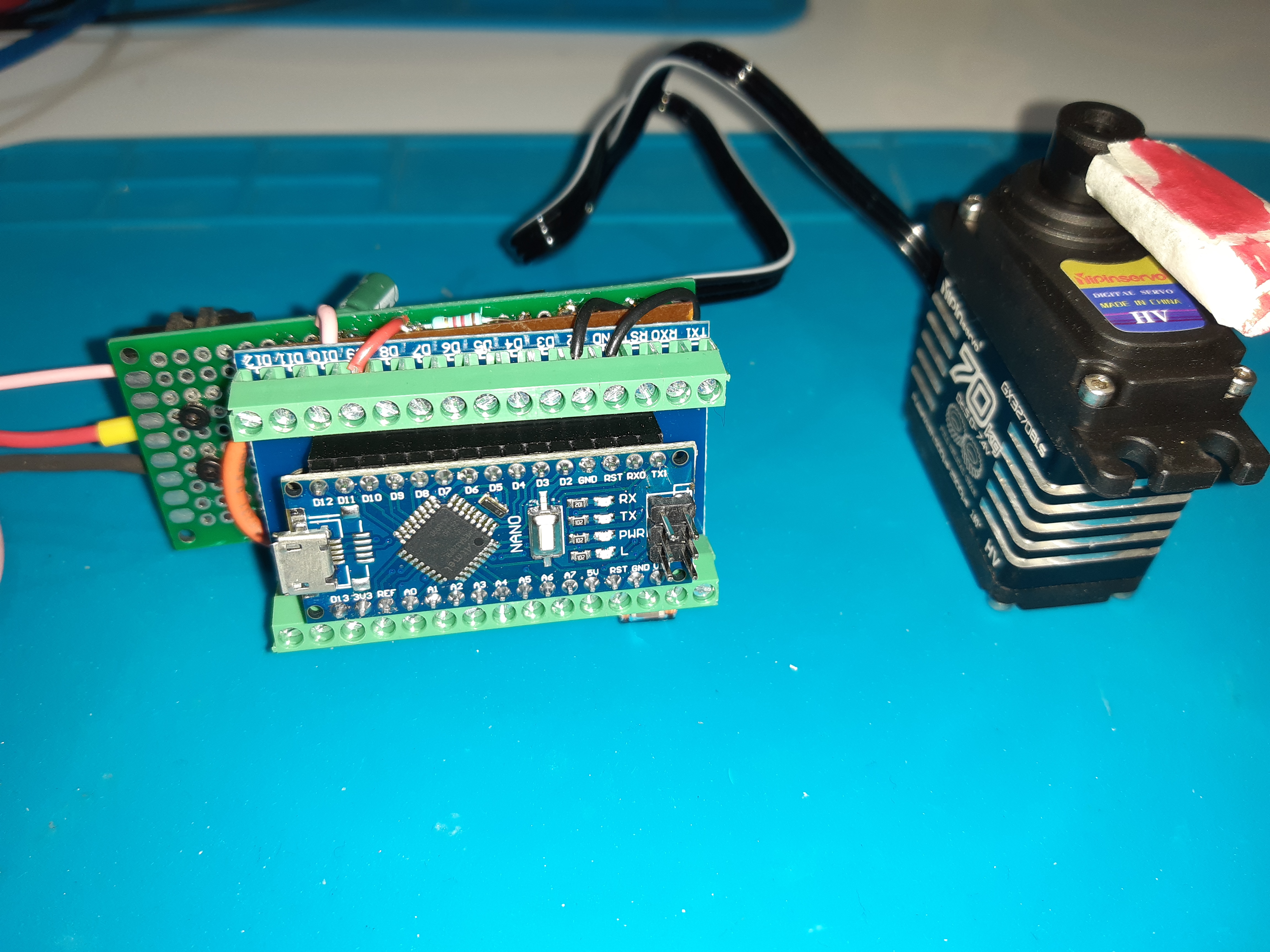
1. DESCRIZIONE DEL SISTEMA
Sistema di controllo servo progettato per applicazioni industriali leggere, con:
- controllo manuale tramite potenziometro filtrato
- richiamo di due posizioni memorizzate
- velocita regolabile
- comandi seriali per regolazioni fini
- movimento con accelerazione esponenziale
- gestione intelligente del servo (attach/detach)
- macchina a stati deterministica
- nessun movimento all accensione
2. INGRESSI DIGITALI
Codice
- WORK - Abilita movimento (0 = fermo)
- MODE - 0 = Manuale, 1 = Memorie
- MEMPOS1 - Richiama posizione memorizzata 1
- MEMPOS2 - Richiama posizione memorizzata 2
- MODOTEST - Salva velocita (fronte 0→1)
- DETACH - 0 = detach a fine movimento, 1 = servo sempre attivo
- SERIALDEBUG - Attiva messaggi di debug
- SOFTMODE - Seleziona curva di accelerazione
3. MACCHINA A STATI
Codice
- ST_IDLE - Nessun movimento, servo detach
- ST_MANUAL - Movimento da potenziometro
- ST_MEM1 - Movimento verso pos1
- ST_MEM2 - Movimento verso pos2
- ST_TEST - Movimento manuale + salvataggio velocita
Logica di transizione:
- WORK = 0 → ST_IDLE
- MODOTEST = 1 → ST_TEST
- MODE = 0 → ST_MANUAL
- MEMPOS1 = 0 → ST_MEM1
- MEMPOS2 = 0 → ST_MEM2
- Nessuna condizione → ST_IDLE
4. MEMORIE EEPROM
Codice
- pos1 - Posizione memorizzata 1
- pos2 - Posizione memorizzata 2
- potVelEE - Velocita salvata (1-255)
Salvataggio automatico velocita: quando MODOTEST passa da 0 a 1.
5. MODALITA OPERATIVE
Manuale (MODE = 0)
- Il servo segue il potenziometro filtrato
- Velocita = potVelEE
Memorie (MODE = 1)
- MEMPOS1 → pos1
- MEMPOS2 → pos2
Test (MODOTEST = 1)
- Movimento manuale
- Salvataggio velocita
Idle (WORK = 0)
- Nessun movimento
- Servo detach se permesso
6. COMANDI SERIALI (1-8)
Baud: 115200 - inviare numero + INVIO
Memorizzazione
- 1 - Salva posizione attuale → pos1
- 2 - Salva posizione attuale → pos2
- 3 - Salva velocita da potenziometro
- 4 - Stampa valori EEPROM
Jog (movimenti manuali)
- 5 - -10°
- 6 - -1°
- 7 - +1°
- 8 - +10°
7. PROCEDURE RAPIDE
Salvare una posizione
- Portare il servo nella posizione desiderata
- Inviare 1 (pos1) o 2 (pos2)
Salvare la velocita
- Regolare il potenziometro
- Inviare 3
Richiamare una posizione
- MODE = 1
- Premere MEMPOS1 o MEMPOS2
8. NOTE OPERATIVE
- Il servo non si muove se WORK = 0
- Jog sempre disponibile via seriale
- Debug attivo solo con SERIALDEBUG = 1
- DETACH = 0 → servo disattivato a fine movimento
9. SICUREZZA
- Non forzare il servo
- Non superare 0-180°
- Usare alimentazione adeguata
- Non scollegare durante il movimento
/*
* SERVO due posizioni con WATCHDOG e Rampa Soft
* Logica: Al power-on ignora D2 per 2 secondi (lo forza HIGH/Aperto)
* per evitare guizzi meccanici e letture spurie.
*/
#include L.Pautasso (contatti: lpautas gmail) & I.A.
I banner pubblicitari contenuti in questa pagina sono noiosi, ma ci consentono di pagare le spese del server. Se clicchi su uno di essi, contribuirai anche tu al mantenimento del sito. GRAZIE

Categorie Articoli
Come-Trovare-Facilmente-l-Equivalente-di-un-Transistor
Corso-di-elettrotecnica-ed-elettronica-3-volumi
Libro-tutto-sull-audio---inglese
Libro-ELETTRONICA-FONDAMENTALE
Dove-acquistare-abbigliamento-risparmiando
Come-vedere-le-partite-sullo-smartphone
Come-difendersi-dagli-allegati-pericolosi-nelle-email
KEEPASS-un-posto-sicuro-per-le-nostre-PASSWORD
I-3-trend-estivi-del-2020-scopri-i-tagli-che-ti-stanno-meglio
Ultimi articoli
Arduino-Debug-Facile APRI
Opta-Finder---PLC-Arduino-compatibile APRI
Servo-motore-a-due-posizioni-memorizzabili APRI
Nextion-Display-with-Arduino-Mega APRI
Display-Nextion-ed-Arduino APRI
Esp8266-Cloud-data-logger APRI
Un-disco-da-15-GB-gratis APRI
Come-copiare-1-TB-di-dati-su-WINDOWS APRI
Parallelatore-Camper APRI
Come-Trovare-Facilmente-l-Equivalente-di-un-Transistor APRI
Delaying-the-Switch-to-LPG APRI
Ritardare-la-commutazione-a-GPL APRI
OPTA-FINDER-ARDUINO-COMPATIBLE APRI
whatsapp-alarm-repeater APRI
Arduino_Template_Menu_Eng APRI
Arduino_Template_Menu APRI
Power-Supply-with-Current-Control APRI
Vantaggi_Alimentatori-Controllo_Corrente APRI
Camping-La-Secca-Moneglia APRI
Safety-Relays APRI
Rele-di-sicurezza APRI
Internal-or-External-Watchdog APRI
Watchdog-interno-o-esterno APRI
Ripetitore-di-allarme-su-Whatsapp APRI
Bufala-in-crosta APRI
Home-Automation-ESPeriment APRI
ESPerimento-Domotica APRI
Arduino-measures-liquid-level APRI
Arduino-misura-livello-liquidi APRI
finder APRI